

El ictus o accidente cerebrovascular es la principal causa de discapacidad a largo plazo para los adultos; por ello, los esfuerzos de la neurorrehabilitación están centrados en trabajar con el objetivo de disminuir o evitar dichas discapacidades a largo plazo.
Si bien es cierto que va evolucionando, cambiando, mejorando y perfeccionando, la realidad actual es que los resultados de la rehabilitación neurológica siguen siendo muchas veces insuficientes e incluso deficientes. En los últimos años, se ha reivindicado la necesidad de realizar terapias de una manera más adecuada, apropiada y precisa, con mayor rigor, demostrando que la recuperación depende entre otras cosas de la intensidad, las repeticiones, la especificidad y la retroalimentación durante la rehabilitación. Por ello, en los esfuerzos por mejorar todo esto se han desarrollado, entre otras cosas, herramientas novedosas basadas en nuevas tecnologías para mejorar la recuperación y aportar una forma de trabajo distinta y novedosa en neurorrehabilitación, en combinación e integrado con la terapia manual más convencional.
Dentro de estas nuevas tecnologías, con las terapias robóticas, se pueden crear protocolos de intervención que aprovechan los principios del aprendizaje motor: repetición, intensidad y especificidad. Dentro de una intervención robótica, los pacientes pueden participar incluso en miles de repeticiones o más de un movimiento específico en una sola sesión de intervención. Si estas se agrupan en varias sesiones, esta repetición masiva puede proporcionar potencialmente el estímulo necesario para provocar cambios dentro de la corteza motora y proporcionar un efecto duradero o incluso permanente en el tiempo.
Las nuevas tecnologías para la rehabilitación neurológica deben ser fáciles de usar y ofrecer a los pacientes beneficios reales. Además, los tratamientos que brinden deben ser eficaces y eficientes.
Para lograr mejora y restauración de la función motora después del accidente cerebrovascular, el entrenamiento asistido por robot que aplica movimientos repetitivos para tareas específicas de la extremidad superior e inferior es actualmente uno de los enfoques más prometedores. En estudios se ha visto que pacientes que reciben entrenamiento asistido por robot en combinación con fisioterapia después de un ictus tienen más probabilidades de lograr una mejor función motora que los pacientes entrenados sin estos dispositivos, o solo con estos dispositivos.
La pregunta por la eficacia de este tipo de dispositivos en neurorrehabilitación debe cambiarse por la de qué pacientes pueden beneficiarse más del uso de estos dispositivos, por ello es necesario determinar qué aspectos, características y criterios deben cumplirse para que un paciente sea población objetivo para el uso de estas tecnologías. Aunque actualmente hay estudios que prueban la eficacia y efectividad de estos dispositivos, es necesario continuar realizando estudios e intervenciones de calidad que sigan probando los beneficios de este tipo de tecnologías combinadas con la terapia manual más convencional o por sí solas, así como profundizando en diferentes aspectos que aún no están claramente definidos. Como toda forma de tratamiento, la robótica tiene sus contraindicaciones, así como sus ventajas y desventajas.
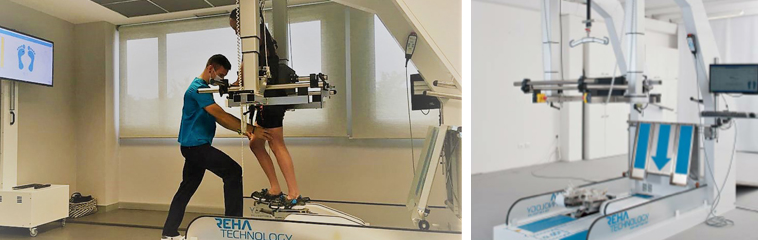
GE-O SYSTEM
En GRUPO 5 CIAN Navarra contamos con un novedoso y avanzado dispositivo en el mundo de la rehabilitación: El G-EO System™.

Se trata de un efector terminal robótico cuyo propósito de su aplicación es el de ayudar a los pacientes con accidente cerebrovascular y otras afectaciones neurológicas a mejorar y recuperar su capacidad de caminar e independencia en la vida diaria. Consta de dos plataformas para los pies libremente programables que pueden simular cualquier patrón de marcha; además cuenta con un sistema que dota de capacidad para subir y bajar escaleras, algo muy novedoso dentro de la robótica para miembros inferiores. Cuenta con otras funciones y componentes como el escenario visual, que pueden conectarse al dispositivo y proporcionar al paciente información en tiempo real y apoyo visual de sus movimientos. Este dispositivo se adapta a la capacidad del paciente y recibe un feedback en tiempo real durante la terapia para optimizar y mejorar aún más su recuperación funcional. Además de caminar por suelo y subir y bajar escaleras, cuenta también con la posibilidad de realizar movimientos parciales con los 2 miembros inferiores para poder trabajar fases más analíticas de la marcha si se precisase o incluso escenarios visuales (parques, playa,…) para poder realizar una terapia diferente o enfocada en otros aspectos distintos a la biomecánica de la marcha que también nos interesen
En CIAN Navarra, nuestro equipo de terapeutas selecciona rigurosamente el tipo de paciente diana que puede beneficiarse de este tratamiento en conjunto con terapia manual. De esta manera buscamos la transferencia de lo trabajado previamente para intensificar y repetir, pudiendo iniciar o continuar con el trabajo de rehabilitación de la marcha en un entorno seguro y controlado, permitiendo trabajar la deambulación cuando no es posible sobre suelo, de una manera optimizada y con unos parámetros precisos. Para aplicar un tratamiento optimizado que nos permita estimular los diversos sistemas (como el generador central de patrones) que se precisan para producir las mejoras, adaptaciones y avances que buscamos, necesitamos conocer y aplicar los parámetros de manera precisa, entre otros el % de descarga de peso, la intensidad y duración de tratamiento o la velocidad de marcha.
Seguimos caminando para que las personas con daño cerebral tengan una rehabilitación de calidad y adaptada a sus necesidades.